



 본사 및 시설 투어
본사 및 시설 투어
 재료 조달
재료 조달































 Yaskawa Group
Yaskawa Group
지속 가능성
본사 및 시설 투어
재료 조달
Yaskawa Group2023 년 1 월 10 일
최근 몇 년 동안 많은 협업 로봇이 생산 현장에 소개되었습니다. 인간의 공동 작업 로봇은 사람들이 안전을 위해 울타리로 분리하지 않고 사람들과 같은 공간을 공유하면서 사람들이 함께 일할 수 있도록 설계된 로봇입니다.
Motoman-HC 시리즈의 협업 로봇에는 로봇 운영에 익숙하지 않더라도 쉽게 작동 할 수있는 직접적인 교육 기능이있어 기존 산업 로봇보다 쉽게 도입 할 수 있습니다. 또한 핸드 캐리 타입에는 푸시 가능한 카트에 Motoman-HC10DTP가 장착되어 있으므로 필요한 위치와 어디에서나 필요한 위치로 쉽게 이동할 수 있습니다.
이번에는 국립 대학교 기업인 Kyushu University와 협력하여 인간 협업 로봇을 사용하여 피팅, 연마 및 디버 킹과 같은 접촉 작업을 쉽게 구현할 수있는 방법을 고려하고 현재 수동 작업을 자동화하는 노력을 소개합니다.
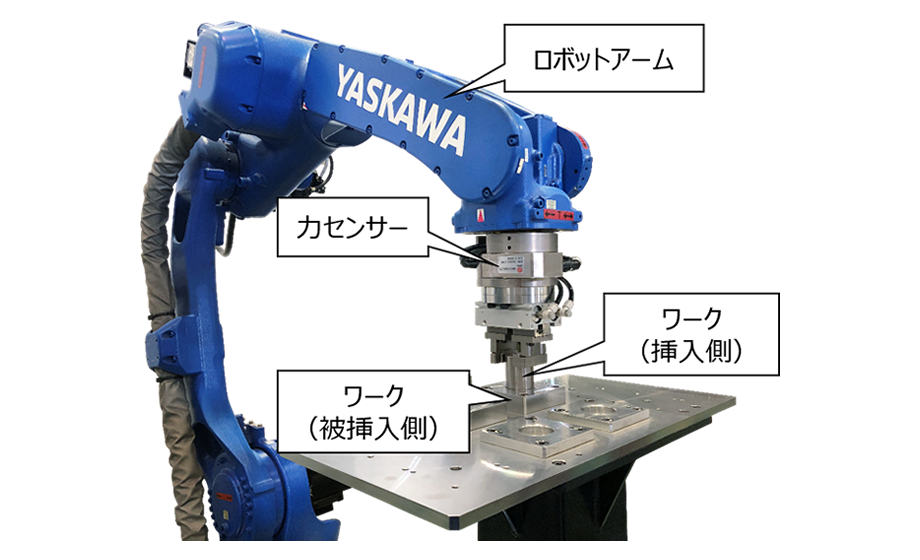
그림 1 힘 바카라 사이트 주소 기능을 사용한 피팅 작업 Motofit
피팅, 그라인딩 및 디버 링과 같은 작품에는 숙련 된 운동이 필요하며 인간의 손에 의존합니다. 이러한 작업을 로봇으로 자동화하려면 인간의 손을 대체하는 로봇 팔로 물체 (작업이라고 함)를 만지면서 힘의 양을 능숙하게 재현해야합니다. 따라서 힘 센서는 로봇 암의 손목에 있습니다.*1설치되고 강제 바카라 사이트 주소는 센서 피드백을 통해 구성되어 작업 자동화가 가능합니다. 우리 회사는 Motofit이라는 이름 으로이 힘 바카라 사이트 주소 기능을 상업화했습니다 (그림 1).
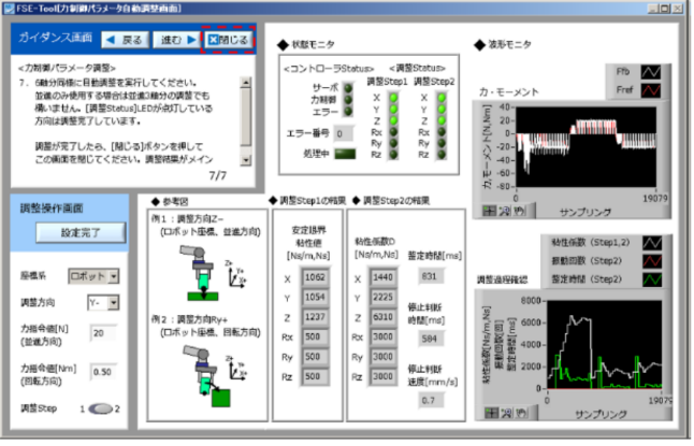
그림 2 힘 바카라 사이트 주소 매개 변수 조정 기능 화면 (PC의 소프트웨어)
로봇은 금속, 수지 및 고무를 포함한 다양한 재료를 처리하고 각 공작물에 대한 힘 바카라 사이트 주소 매개 변수를 조정하여 안정적이고 우수한 (짧은 재치 시간) 작동이 달성됩니다 (그림 2). 그러나 매개 변수 조정을 포함한이 힘 바카라 사이트 주소 기능은 산업용 로봇을 다루는 경험이 거의없는 사용자에게는 어렵습니다.

그림 3 HC10 Human Collaborative Robot의 특징
최근 상용화 한 Motoman-HC 시리즈 인간 협업 로봇 시리즈는 산업용 로봇을 처리하는 경험이 거의없는 사용자에게도 비교적 쉽게 가르 칠 수 있습니다. 교수 작전은 로봇의 팔을 직접 잡고 힘을 바르는 동안 힘을 바꾸는 사람이 수행합니다. 이것을 직접 교육 기능이라고합니다. 또한 안전 울타리없이*2인간과 로봇 사이의 협업을 만듭니다. 이것은 그림 3과 같이 각 조인트에서 제공되는 토크 센서 (이하 조인트 토크 센서라고 함)의 신호입니다.
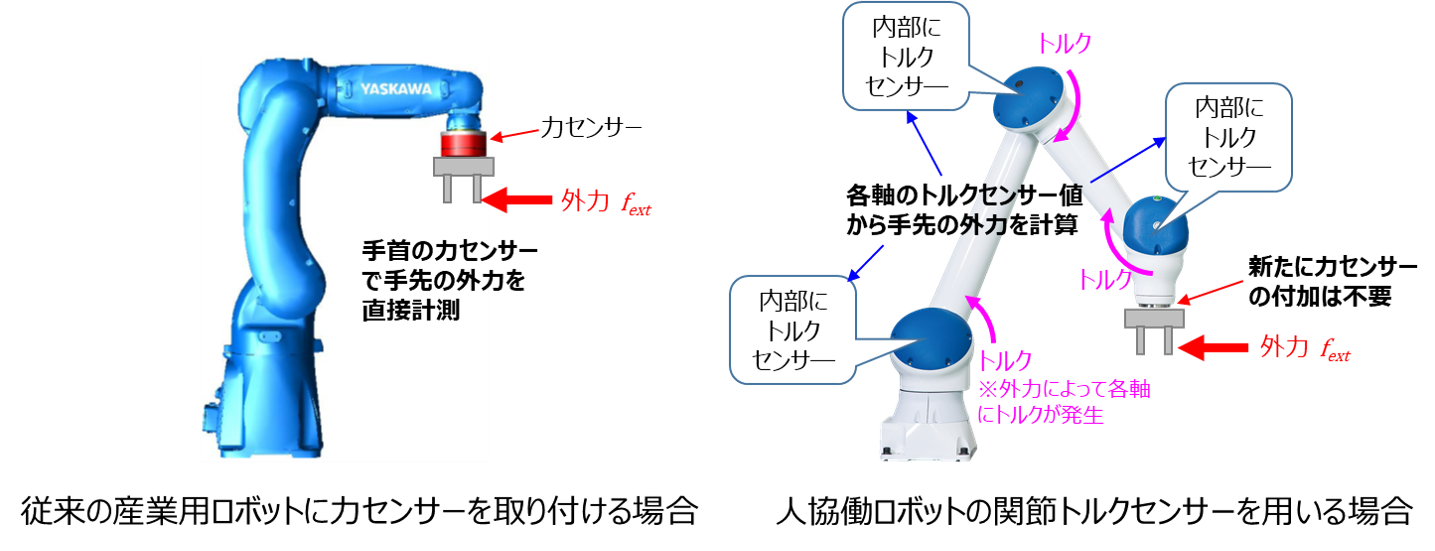 그림 4 힘 바카라 사이트 주소 비교
그림 4 힘 바카라 사이트 주소 비교
*1 힘 센서
힘과 순간을 감지하는 센서.
*2안전 울타리 없음
HC 시리즈의 안전 기능을 통해 안전 장벽없이 시스템을 구성 할 수 있지만 모든 경우에 위험 평가를 수행해야합니다.
인간의 공동 작업 로봇은 6 도의 자유가있는 수직 관절 로봇입니다. 로봇 모션 바카라 사이트 주소의 자유의 자유의 자유 (ARM의 각 조인트의 액추에이터 바카라 사이트 주소 및 작업에 대한 손에 의해 가해지는 힘을 바카라 사이트 주소 함)는 복잡하기 때문에 편의를 위해 힘을 제한하여 로봇 운동의 1 도의 자유로 제한함으로써 힘을 설명 할 것입니다. 1 도의 자유에 대한 개략도의 경우 (그림 5), 우리는 피팅 작업의 사진을 예를 들어 추가합니다. 손으로 로봇이 보유한 공작물 (삽입 측면)은 도식 다이어그램에 표시된 "로봇"에 포함되며 플랫폼에 고정 된 공작물 (삽입 된 측면)은 "환경"(그림 6)에 해당됩니다.
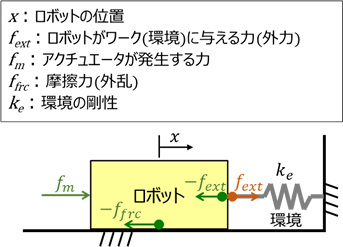
그림 5 1 도의 퇴근 로봇의 개략도
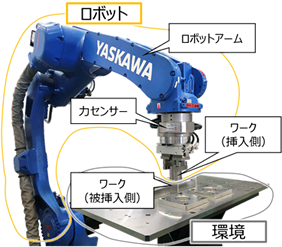
그림 6 힘 바카라 사이트 주소 기능을 사용한 피팅 작업 Motofit
다양한 힘 바카라 사이트 주소 방법이 있지만 기존의 힘 바카라 사이트 주소 방법에는 임피던스 바카라 사이트 주소 및 입학 바카라 사이트 주소가 포함됩니다. 임피던스 바카라 사이트 주소 및 입학 바카라 사이트 주소 모두에서 로봇은 외부 힘을 제공하는 데 사용됩니다.fext관성으로 이동하는 방법Md, 점도Dd, 강성Kd

. 여기,fRefTarget Force (Force Command),xRef대상 위치 (위치 명령)입니다.
그림 7과 같이 임피던스 바카라 사이트 주소는 위치 편차xRef- x그러한 힘을 생성하기 위해 그것을 통제합니다. 그것은 어려운 환경과의 접촉에 대해 상대적으로 안정적이지만 마찰력fFRC에 취약하며 정상 상태 편차가 강화되면서 예상대로 움직이지 않을 수 있습니다.
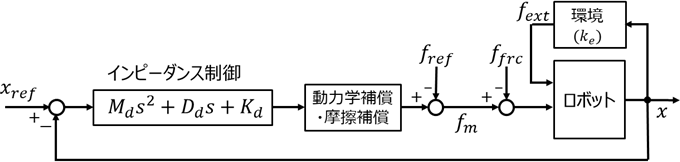
그림 7 임피던스 바카라 사이트 주소 블록 다이어그램
교정 바카라 사이트 주소는 그림 8fRef- Fext40941_41090
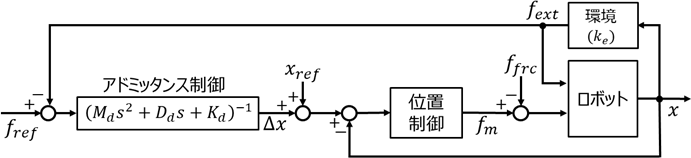
그림 8 입학 바카라 사이트 주소의 블록 다이어그램
위의 ① 및 ②에 표시된 특성으로 인해 임피던스 바카라 사이트 주소는 단단한 환경과 접촉하는 데 유리하지만 입학 바카라 사이트 주소는 부드러운 환경과 접촉하는 데 유리합니다. 따라서 우리는 어드미턴스 바카라 사이트 주소 바카라 사이트 주소와 임피던스 바카라 사이트 주소를 직렬로 연결함으로써 두 가지 장점을 활용할 수있게 해주었다 (그림 9). 이 바카라 사이트 주소 규칙에서 환경에서 작용하는 최초의 외부 힘을 사용해야합니다.fext| IS 입력 및 손 위치의 수정량은 교정 바카라 사이트 주소에 의해 얻어집니다Δx. 그런 다음 명령을 positionxRef및 교정 금액Δx평형 지점으로fm.

그림 9 교정 임피던스 바카라 사이트 주소의 블록 다이어그램
따라서 하드 환경에 접촉 할 때 입원 바카라 사이트 주소에 진동 동작이 있더라도 후기 단계에서 임피던스 바카라 사이트 주소의 동작에 의해 감소 될 수 있으며, 소프트 환경에 접촉 할 때 마찰로 인한 오류가 있더라도 소프트 환경에 접촉 할 때 손가락 바카라 사이트 주소에 의해 수정 될 수 있습니다. 결과적으로, 당신은 소프트에서 단단한 곳에서 다양한 강성 워크 피스를 처리 할 수 있습니다.
다양한 강성 환경과 접촉 할 때의 일축 시뮬레이션 결과는 그림 10에 나와 있습니다.이 시뮬레이션에서는 각각 임피던스 바카라 사이트 주소 및 입학 바카라 사이트 주소의 특성 매개 변수 (관성)가 각각입니다.Md, 점도Dd, 강성Kd)는 환경에 관계없이 고정되어 있습니다. 부드러운 환경 (강성)ke= 10)와 접촉 할 때, 임피던스 바카라 사이트 주소 (파란색)는 마찰에 의해 영향을 받고 큰 편차를 생성하지만 제안 된 방법 (빨간색)은 작은 편차를 가지며 고속으로 수렴합니다. 하드 환경 (강성)ke= 3200)와 접촉 할 때, 입학 바카라 사이트 주소 (녹색)는 진동이지만 제안 된 방법 (빨간색)은 작은 편차가 있으며 고속으로 수렴합니다. 이러한 방식으로, 우리는 단단한 환경에 대해 더 나은 결과 (낮은 진동, 높은 응답, 작은 편차)를 얻을 수 있지만 여전히 동일한 매개 변수 설정을 유지할 수 있음을 확인했습니다.

그림 10 환경 합성ke변경시 시뮬레이션 결과
1 도의 자유로 로봇 운동의 힘 바카라 사이트 주소를위한 새로운 제안 된 방법이 개발되었습니다. 앞으로, 우리는 여러 축 (더 많은 자유도 로봇 이동)으로 확장하여 로봇을 더욱 검증하기 위해 조인트 토크 센서가 장착 된 인간 협업 로봇에서 구현하고 힘 바카라 사이트 주소 매개 변수를 조정하지 않고 다양한 강성 환경과 고속의 안정적인 접촉을 달성하는 것을 목표로합니다. 또한, 다중 축의 경우, 예를 들어, 곡선 표면을 복사 할 때, 표면 및 수평에 수직으로 방향으로 바카라 사이트 주소 특성을 변경하고 제안 된 방법에 따라보다 정교하고 복잡한 접촉 작업이 실현됩니다.
이 바카라 사이트 주소을 실현함으로써, 우리는 인간 협업 로봇으로 수행 할 수있는 작업 범위를 넓히고 생산성 향상에 기여할 것입니다.
앞으로 Yaskawa Electric의 바카라 사이트 주소의 지속적인 진화를 기대하십시오.
![]()

저작권 © 2003-2025 Yaskawa Electric Corporation.







