



 본사 및 시설 투어
본사 및 시설 투어
 재료 조달
재료 조달































 Yaskawa Group
Yaskawa Group
지속 가능성
본사 및 시설 투어
재료 조달
Yaskawa Group
| 바카라 하는 곳 분야 | 로봇 바카라 하는 곳, IoT 바카라 하는 곳 |
| 바카라 하는 곳 키워드 | 자동화, 인간 협업, 고품질, 고효율, 비용 절감, 생산성 개선, IoT, 데이터 활용, 효율성, 다중 제품 소규모 생산, I3-Mechatronics, Robot |
2024 년 1 월 10 일
최근 몇 년 동안 생산성과 품질 개선 개선 요구를 충족시키는 것 외에도, 다각적 인 요구와 노동 부족을 해결하기 위해, 다양한 가변 생산 및 수동 바카라 하는 곳의 자동화에 유연하게 대응할 수있는 장비가 필요해졌다.
이러한 시장의 요구를 충족시키기 위해 "I3-mechatronics"를 제안하고 데이터를 기반으로 자율적 인 분산 제조를 제안합니다.
2023 국제 로봇 전시회가 "I3-mechatronics의 "차세대 제조 데이터를 중심으로 한 차세대 제조 데이터를 중심으로, 우리는 다양한 부품 및 생산 절차를 가진 여러 제품의 조립을 시연했습니다. 우리는 디지털 데이터의 사용을 통해 가변 가변 생산 및 생산 효율성과 품질을 지원하는 유연한 생산 시설 구성과 품질을 지원하는 유연한 생산 시설 구성을 강조하는 솔루션을 도입했습니다 (새로운 시리즈 (자동화 된 영역의 자동화). 식기 세척 요리, 중고 의료 장비 멸균 작업의 자동화 및 야채 복싱 작업의 자동화)
이 보고서는 Yaskawa Electric의 제조 개념을 목표로하고 최신 제품 라인업을 소개합니다.
차세대 제조 산업을 달성하기위한 Yaskawa Electric의 주요 바카라 하는 곳은 "자율 분산 제어", "데이터 활용"및 "디지털 트윈"입니다 (그림 1).
 그림 1 : Yaskawa Electric을 목표로하는 차세대 제조를 실현하는 핵심 바카라 하는 곳
그림 1 : Yaskawa Electric을 목표로하는 차세대 제조를 실현하는 핵심 바카라 하는 곳고정 된 "One Production Line"의 전통적인 개념과 독립적 인 셀*1유형의 생산 장비를 구축하고 협력하여 다양한 품종과 생산 절차를 갖춘 제품 생산을 처리 할 수 있습니다. 자율적으로 자율적으로 생성하고 세포별로 분산시키는 것에 적응할 수있는이 메커니즘을 "자율 분산 제어"라고합니다. "YRM-X 컨트롤러"는이 자율 분산 제어를 가능하게합니다. 셀의 장비에 대한 정보는이 YRM-X 컨트롤러에 의해 수집되며 로봇은이 정보를 사용하여 자체 작업을 진행하고 작동하는 것이 괜찮은지 여부를 결정합니다.
이 데모에서, 우리는 데이터를 기반으로 자율적으로 자율적으로 판단하고 움직임으로써 각 장치가 생성되는 것들의 변화에 어떻게 응답 할 수 있는지 소개했습니다.
*1 셀이란?
공장 생산 라인에서 한 단위의 작업 단위
셀 데이터를 디지털 데이터 관리 기능을 갖는 "Yaskawa Cockpit"과 셀 데이터를 통합하는 "YRM-X 컨트롤러"를 결합하면이를 시각화하고 분석 할 수 있습니다. 시간 동기화 된 데이터로서 셀의 상태 데이터 (제품 ID, 검사 결과 등) 및 프로세스 데이터 (토크, 온도 등)를 수집하고 누적 된 데이터를 분석하여 생산 효율성을 향상시키는 데 사용할 수 있으며 상태 데이터를 통해 추적 성을 향상시킬 수 있습니다. 또한 작동 시간과 작동 상태를 알면 속도 감소 및 컨트롤러의 기본 구성 요소의 수명을 시각화 할 수 있습니다.
이 데모에서는 모듈 세트에서 나사 조임 토크 파형 데이터를 사용하여 볼트 조임 검사의 자동화와 검사 과정에서 AI 기반 스크래치 검사를 도입했습니다.
당사의 "디지털 트윈"은 데이터가 계획 할 가상 환경과 실행하고 상호 작용하는 실제 환경을 연결한다는 사실을 특징으로합니다. 장비가 도입되고 변경되는 엔지니어링 단계에서는 사이트와 유사한 환경에서 장비를 미리 생성 할 수있어 현장에서 실제 기계를 발사하는 데 필요한 시간을 크게 줄일 수 있습니다. 생산 단계에서 현장 운영 데이터는 사실상 재 피워 및 비교되어 계획과 실행 사이의 격차를 분석하고 다음 계획에 대한 피드백을 할 수 있습니다. 또한 생산 중에 문제가 발생하더라도 현장의 상황을 사실상 복제하고 문제를 조기에 해결할 수 있습니다.
이 데모에서 우리는 제품을 사용하여 가상 현장 환경 인 "Yaskawa Cell Simulator"를 만들고 디지털 트윈을 실현했습니다.
우리는 다양한 제품 형태, 크기 및 모듈로 세 가지 유형의 제품 (제품 A, 제품 B, 제품 C (그림 2))를 조립하는 다양한 변수의 생산 라인을 재현했습니다 (그림 3).
조립할 모듈이 적은 제품 A에는 "모듈 어셈블리 (SUB)"프로세스가 필요하지 않습니다. 우리는 "One Production Line"의 이전 고정 된 접근 방식에서 전환했으며 다양한 품종과 생산 절차를 갖춘 가변 생산에 적응하기 위해 독립적 인 "셀 별 생산 시설"을 구축했습니다.
이 데모는 표 1에 표시된 5 개의 셀로 구성되며, 각 셀에 여러 로봇과 장치가 배열되며 작업이 협력하여 수행됩니다. 또한, 셀은 AMR (자율 전송 로봇) 수송에 의해 유연하게 연결됩니다.

그림 2 생산 제품 및 절차
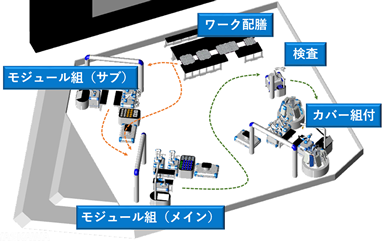
그림 3 : 전시회의 전반적인 그림
표 1 셀 구성

이번에는 i3-우리는 Motoman을 Mechatronics 구현의 주요 구성 요소 중 하나로 전시했습니다. Motoman Next는 "해상 영역"을 자동화하기위한 새로운 시리즈입니다. 산업 로봇 산업에서 처음*2, 주변 환경에 따라 자체 판단과 계획을 수행하고 지시받는 작업을 자율적으로 완료 할 수있는 로봇.
아래에서 우리는 다음 Motoman의 기능과 응용 프로그램 예제를 소개합니다.
*2 우리 회사가 연구, 주요 로봇 제조업체 자격
Motoman Next는 상황을 직접 이해하고 결정을 내리고 자신만의 방식으로 계획하며 가장 최적의 방식으로 작업을 완료합니다. 교육 재생 방법에서 벗어나 작업 지침을 제공하여 단순히 로봇 이동을 자동으로 생성합니다.
우리는 또한 고객과 파트너의 노하우와 지식을 사용하여 로봇 애플리케이션을 구축 할 수 있도록 개발 환경을 열었습니다.
제조 현장에는 상태의 불확실한 변화, 모양, 크기, 작업 순서의 변화 및 중단과 같은 인간의 판단이 필요한 많은 "아동 영역"이 여전히 남아 있습니다. "아동화되지 않은 지역"에서 작업을 자동화하기 위해, 우리는 광범위한 플레이어가 능숙한 영역의 바카라 하는 곳, 노하우 및 지식을 모으는 것이 중요하다고 생각합니다. 이러한 이유로, 우리는 고객 및 파트너와 협력하여 "아동 영역"의 자동화를 다루는 로봇 인 "Motoman Next Series"를 개발했습니다.

그림 4 : Motoman Next Operation
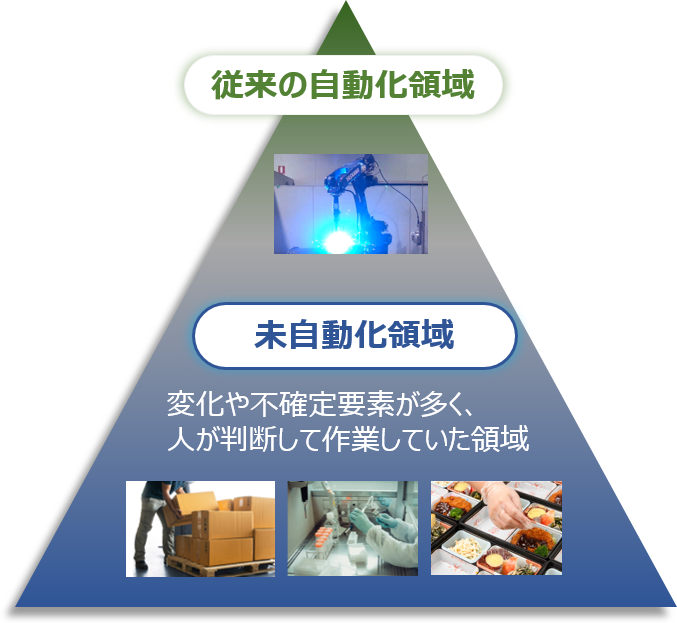
그림 5 Unautomated 지역

그림 6 : 식기 준비 작업의 자동화
그림 6은 Motoman Next의 표준 인 다양한 기능을 보여줍니다 (AI*3/이미지 처리/경로 계획을 결합하여 달성하는 접시 준비 자동화 솔루션입니다. 테이블의 접시는 조각으로 나뉘어져 있으며 위치가 고정되어 있지 않으므로 남은 음식을 분리하는 작업을 포함하여 청소 과정을 자동화하기가 어렵습니다.
Motoman은 다음에 접시의 모양과 위치와 같은 환경을 독립적으로 인식하고 해당 환경에 따라 작동을 결정합니다. 요리를 집어 들고 배치하기위한 논리는 바카라 하는 곳이라는 작업 지침으로 미리 구현할 수 있습니다. 바카라 하는 곳 조합을 사용하여 로봇 작업을 지시하고 나머지 패스를 자동으로 생성함으로써 요리 수집, 남은 음식을 분리하고 청소 선반으로 옮길 수있는 복잡한 작업을 쉽게 달성 할 수 있습니다.
또한 AI를 사용하여 남은 음식의 유형과 양을 결정하고 데이터베이스에 기록하고 분석하여 남은 음식의 추세를 이해하고 음식물 쓰레기를 줄이는 데 기여합니다.
*3 AI 세대 개발 환경이 별도로 필요합니다

그림 7 중고 의료 기기의 멸균 자동화
의료 장비의 멸균은 종종 빈번한 우선 순위와 같은 상황을 바꾸므로 주로 노동이 수행됩니다.
이 경우, "행동 트리"를 다음에 Motoman의 자율 단위에 도입함으로써, 상황의 변화에 따라 작업의 내용과 순위를 유연하게 결정할 수 있으며 실행 상태를 시각화 할 수 있습니다 (그림 7).
이러한 방식으로 Motoman Next에는 다양한 오픈 소스 소프트웨어 자산뿐만 아니라 고객 및 파트너의 고유 한 소프트웨어 자산을 활용하여 판단 및 작업 기능을 더욱 향상시킬 수있는 개방형 플랫폼이 있습니다.

그림 8 야채 복싱 작업 자동화
로봇을 사용한 무기한과 불확실성으로 야채 복싱을 자동화하려면 정교한 프로그래밍 및 조정이 필요하며 다양한 품종을 수용 할 수 없기 때문에 자동화가 어려웠습니다.
Motoman Next는 다양한 서비스로서의 인정 및 판단과 같은 자율적 기능과 함께 표준을 제공하며,이 경우 비전 서비스는 채소의 불규칙한 위치와 크기를 인식하는 데 사용되며 AI 서비스는 긁힘과 배치 위치를 자율적으로 결정하여 복지 과정을 완료하는 데 사용됩니다 (그림 8).
Motoman Next는 고급 판단과 작업을 수행 할 수있는 표준 기능 (서비스)의 조합으로 광범위한 제품을 쉽게 처리 할 수 있습니다. 이것은 Motoman의 참신하고 독특한 특징입니다.
2023 국제 로봇 전시회에서 전시, I3-mechatronics의 솔루션 스마트 제조를 실현하기위한 솔루션을 실현하기 위해, 우리는 차세대 제조업과 새로운 Motoman Next of Robots를 소개했습니다.
지금, i3-mechatronics 개념이 실현되며, 우리는 가변 가변 생산에 대한 대응을 촉진하고, 생산 효율성과 품질을 향상 시키며, 노동 부족으로 인한 사회적 문제를 해결하고 지속 가능한 사회를 실현하는 데 도움이되도록 새로 발표 된 Motoman을 사용합니다.
![]()

저작권 © 2003-2025 Yaskawa Electric Corporation.







